Pixhawk 4 Mini與Jetson Xavier NX串口通信 技術實現與設備租賃指南
無人機與機器人系統的智能化發展,離不開飛控系統與高性能機載電腦的緊密協作。其中,Pixhawk 4 Mini作為一款輕量級、高可靠的開源飛控,與NVIDIA Jetson Xavier NX這款具備強大AI算力的邊緣計算模塊的結合,成為眾多先進無人機、無人車及機器人項目的首選硬件組合。實現兩者間穩定、高效的串口通信,是釋放其協同潛力的關鍵。本文旨在闡述Pixhawk 4 Mini與Jetson Xavier NX之間串口通信的技術實現方案,并探討相關計算機及通訊設備的租賃選擇,為項目開發提供參考。
一、 硬件連接與接口配置
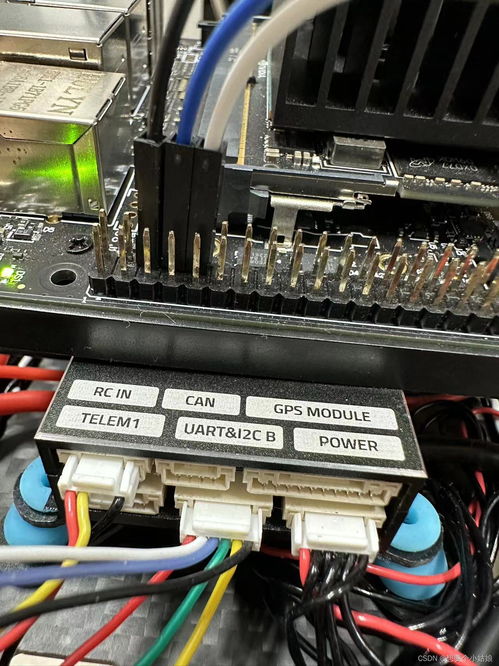
Pixhawk 4 Mini提供了多個串口(UART)接口,通常通過其TELEM1、TELEM2或GPS端口與外部設備通信。Jetson Xavier NX載板(如官方載板或合作伙伴載板)通常也配備多個UART接口(如/dev/ttyTHS1等)。
- 物理連接:使用一根合適的串口連接線(通常是USB轉TTL串口線,或者直接使用杜邦線連接特定UART的TX、RX、GND引腳),將Pixhawk的某個串口(例如
TELEM2)的TX(發送)引腳連接到Jetson Xavier NX某個UART的RX(接收)引腳,RX引腳連接到TX引腳,并確保兩者共地(GND連接)。 - 參數配置:通過地面站軟件(如QGroundControl)連接Pixhawk,進入參數設置界面。需要配置與Jetson相連的串口參數,例如:
- 設置對應串口(如
SERIAL2_PROTOCOL)的協議為MAVLink2(通常值為2)。
- 設置對應串口的波特率(如
SERIAL2_BAUD),常見值為921600或57600,需與Jetson端軟件設置保持一致。
- 確保
MAV<em>1</em>CONFIG等參數指向正確的串口,以啟用MAVLink數據流。
二、 Jetson Xavier NX端軟件設置
在Jetson Xavier NX上,通常使用Python或C++進行串口通信編程,核心是讀取和解析MAVLink協議數據包。
1. 環境準備:確保Jetson Xavier NX系統已安裝Python及必要的庫,如pymavlink、pyserial。可以通過pip安裝:pip install pymavlink pyserial。
2. 串口識別與權限:連接硬件后,在終端輸入ls /dev/tty*查看新增的串口設備(如/dev/ttyUSB0或/dev/ttyTHS1)。使用sudo chmod 666 /dev/ttyXXX命令賦予當前用戶讀寫權限,或更優的做法是將用戶加入dialout組:sudo usermod -a -G dialout $USER,然后重新登錄。
3. 通信程序示例:以下是一個簡單的Python示例,用于從串口讀取MAVLink消息(如心跳包HEARTBEAT):
`python
from pymavlink import mavutil
import time
# 創建MAVLink連接,指定串口設備和波特率
master = mavutil.mavlink_connection('/dev/ttyUSB0', baud=921600)
# 等待接收飛控的心跳包,確認連接
print("等待飛控心跳...")
master.waitheartbeat()
print("心跳已收到! 系統ID: %d, 組件ID: %d" % (master.targetsystem, master.target_component))
# 循環接收并處理消息
while True:
try:
msg = master.recvmatch(blocking=True, timeout=1.0)
if msg is not None:
print(f"收到消息: {msg.gettype()}")
# 這里可以添加對特定消息類型的處理邏輯,如ATTITUDE, GLOBALPOSITIONINT等
except KeyboardInterrupt:
print("程序退出")
break
`
- 數據解析與發送:通過
pymavlink庫,可以方便地解析飛控發送的各類狀態信息(姿態、位置、傳感器數據等),并可以向飛控發送指令(如改變飛行模式、上傳航點、進行控制)。雙向通信是實現自主導航、視覺避障等高級功能的基礎。
三、 計算機及通訊設備租賃考量
對于研發測試、短期項目或需要降低初始硬件投入的團隊,租賃相關設備是一個靈活且經濟的選擇。在租賃用于Pixhawk與Jetson通信開發的設備時,需考慮以下幾點:
- 核心硬件租賃:
- 飛控與機載電腦:明確租賃套餐是否包含Pixhawk 4 Mini飛控、Jetson Xavier NX模塊及必要載板(含散熱方案)。確認硬件的成色、固件版本及接口完整性。
- 外圍與傳感設備:根據項目需要,租賃可能還需包括GPS模塊、電源模塊(電調)、遙控器接收機、相機(如用于Jetson的CSI攝像頭)等。
- 通訊與調試設備租賃:
- 串口適配器:確保租賃套餐提供可靠的USB轉TTL串口線或模塊,用于連接和調試。
- 網絡設備:如需遠程登錄Jetson或進行網絡通信,可能需租賃便攜式路由器或4G/5G網卡。
- 地面站電腦:租賃用于運行QGroundControl等地面站軟件的筆記本電腦或平板電腦,方便參數調試與監控。
- 租賃服務要點:
- 技術支持:選擇能提供基礎技術咨詢或配置指南的租賃服務商,尤其是在系統鏡像預裝、驅動和庫環境配置方面。
- 測試與保修:確認租賃設備在出貨前經過基本功能測試,并了解保修和更換政策。
- 套餐靈活性:根據項目周期(日租、周租、月租)和具體硬件組合需求,選擇可定制的租賃套餐。
- 物流與交接:確認配送、回收流程及設備清單交接確認單,避免爭議。
四、
實現Pixhawk 4 Mini與Jetson Xavier NX的串口通信,是構建智能無人系統的重要一步。關鍵在于正確的硬件連接、飛控參數配置以及在Jetson上利用MAVLink協議庫進行穩定可靠的數據交換。對于許多團隊而言,通過租賃方式快速獲取這套高性能硬件組合進行原型開發或測試,能夠有效控制成本、加速項目進程。在選擇租賃服務時,應重點關注設備的匹配性、可靠性以及服務商的技術支持能力,從而確保開發工作的順利開展。
如若轉載,請注明出處:http://m.jfgame.net/product/19.html
更新時間:2026-05-12 10:51:19